
首先想给大家分享一下我们对智能驾驶未来发展的判断,我们可以从创新曲线来看这个趋势。我们知道,当一项技术在创新过程中,处于 10% 到 20% 阶段是关键节点,要么迎来拐点快速增长,要么坠入创新鸿沟走向消亡。
第一点,智能驾驶是我国智能网联新能源汽车发展战略的一个重要组成部分,在政府工作报告里,国务院的报告里,还有我们工信部,都对整个智能汽车的发展做出了规划和行动方向。在电动化上,我们可以说是变道超车,助力中国汽车从大国走向强国。电动化也助力了产业升级,助力中国制造向中国智造发展。我们相信智能化,在 “十四五”、“十五五”、“十六五” 期间也将是一个重要组成部分。
第二点,是行业的推动,我们看到在过去几年里边,城区 NOA 或者高速 NOA 功能逐渐从这个30 万以上的高端车型逐年下探,今年已经下探到了 15 万以下。另外,今年一季度车企的智驾平权也进一步推动了普及应用,会进一步推动技术的发展,成本的降低和性能的提升,让更多的消费者能够消费得起。
第三点,就是我们中国终端客户的拉动,我们看到麦肯锡有一个统计报告,可以看到大家在选择电动车和燃油车的时候,智能化是在考虑电动车的 TOP2 因素之一,可见智能化已经成为选择电动车的一个主要因素,包括在选择高端品牌的时候也是一样。大家可以看到,前三个里边,两个都是跟智能驾驶和智能座舱相关,也就是说选择在高端车的时候,大家会考虑更多车型的智能属性。
基于这三点,我们认为高阶智能辅助驾驶的拐点已经到来,后面会有比较快速的增长。

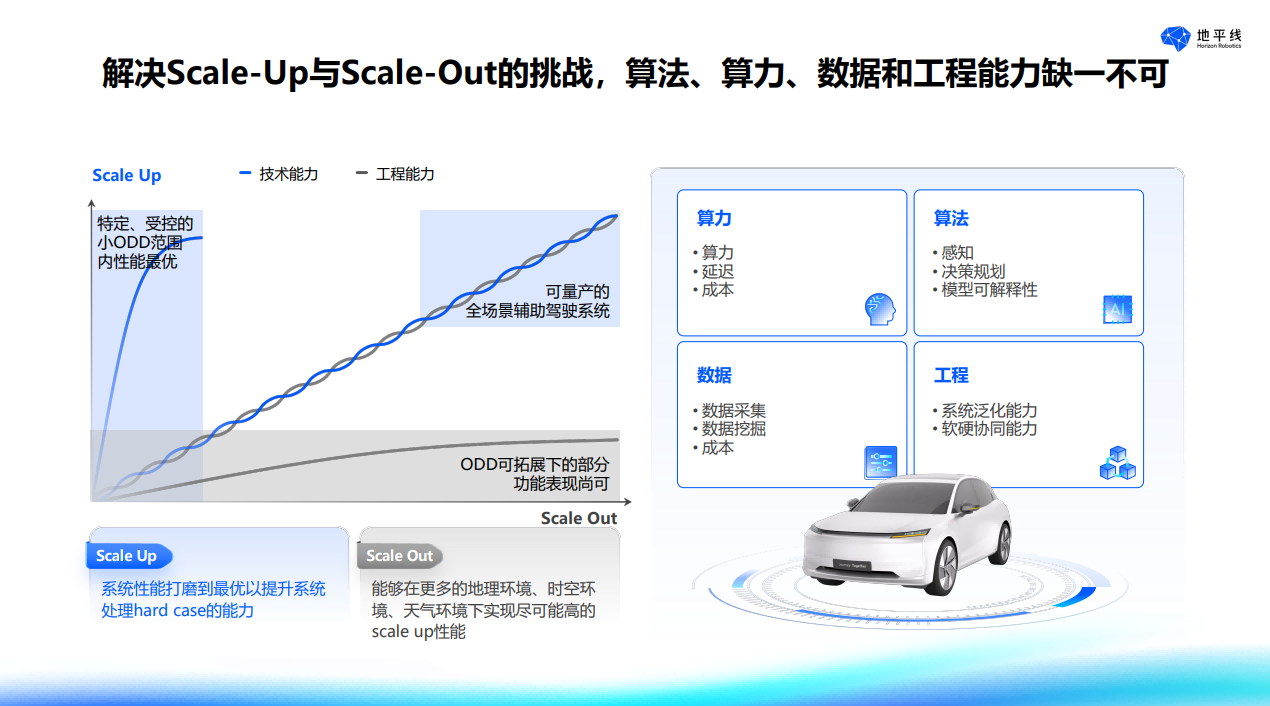
最主要就是城区NOA,它目前还面临着诸多的挑战,举一些简单的例子,大家可以看到,城市的交通状况复杂程度远远高于高速。从用户的角度大家可以感受得到,要么就这个车太“怂”,该走的地方不走,要么就是太“莽”,不该走的地方去抢道,造成安全接管或者安全事故,这些都跟整个系统的性能有关。

再一个就是,它的使用范围受限,也就是我们所说的它这个 ODD 是非常有限,泛化能力非常弱,使用的区域受限,再一个就是成本高,大家不愿意花这个钱。我们把这些问题总结为,需要同时解决系统性能的 Scale Up 和应用场景的 Scale Out。我们看到目前市面上的大部分系统,要么就是性能很高,但是它的使用范围很窄,要么就是使用范围很宽,但是它的性能上限很低。要同时解决性能的 Scale Up 和应用场景的 Scale Out 这两个问题,除了需要大家在谈得比较多的算法、算力和数据这些作为技术支撑,还需要工程能力能够把这些技术变成产品,同时能够降低成本,让每一个用户都能够负担得起。
首先,是我们视觉感知算法不断演进的过程,最初我们传统的视觉算法,它是一个后融合。引入人工智能以后, BEV 算法采用的是一个前融合,就解决了多视角融合的问题,能够很好地解决之前传统视觉不能解决的问题。但同时它也有一些局限性,就是在建模能力还有特征的稳定性仍然不够好。后来就出现了现在最主流的算法,就是 BEV加Transformer,它用注意力机制能够很好地解决这两个问题,在全局视角和特征表达稳定性方面都提供了非常好的performance。但是同时它也有另外一个问题,就是因为二次方计算的复杂性,对计算资源和内存的占用非常大。
那下一步会有什么样的新算法呢?我们地平线跟一些研究机构合作研发了一个最新的算法,这个算法是叫 Vision Mamba,在目去年全球引用量最高的十篇论文里边排行第三,在国内的话是引用量第一,它主要通过引入了一个双向量的状态空间,还有位置编码器,同时解决了计算的问题和视野的问题,从效率和计算资源上都解决了之前 BEV 和 Transformer 带来的问题。这是行业内首个兼具线性复杂度和全局感受野的视觉基础模型,我们认为它可能会成为下一代视觉主干模型,大家可以看到,跟目前几个优秀的传统 Transformer 相比,它的性能提升非常大,特别是在长时序和高精度的要求下,我们可以看到它的计算速度提高了 2.8 倍,对 GPU 资源的占用减少了87%。

地平线的 Senna 架构是一个多模态的大模型,与行业内其他模型不同的是,它将端到端模型与 VLM 模型相结合,两者相互交互,周边所有传感器信息和地图信息都会输入到这两个模型中,特别是 VLM 会将高维决策信息传递给端到端模型,最终实现对车辆的控制。与端到端模型相比,大家可以看到它的平均规划位移误差降低了 40% 以上,然后平均碰撞率也下降了45%,提升是非常巨大的,而且在泛化性、可迁移性、可解释性和这个语言理解方面具备非常强的能力。我举个例子来讲,除了对物体的识别之外,它还能对交警的交通指挥、路牌的信息,以及在上海这种潮汐车道的理解和识别,具备了很多人类的知识和常识判断以及推理能力,这就是这个模型带来的好处。
当前市面上,算力突出的芯片一个是Thor有 700TOPS,再个就是我们最新的旗舰款征程6P 有 560 TOPS 的芯片。随着算力的增长,对整个硬件也提出了一个更高的要求。下面我为大家介绍下征程6家族,这是我们去年发布的最新产品,能够全面支持低、中、高阶全场景智能驾驶应用。
征程 6B 目前在流片当中,近期就会回来,后续有新情况我再给大家做汇报。截止目前,征程6系列已获得了 20 多个品牌的定点合作,将赋能 100 多款智能车型。接下来,再为大家介绍下征程6P ,基于地平线在前端算法的深入研究和积累,以及对算法发展前瞻洞察,同时结合过去四代芯片的研发经验,我们将众多先进技术集成到了这款最新芯片中,尤其是在超越函数、浮点运算以及存储器管理等方面进行了大量创新,使得征程6P在原生支持 Transformer方面, 比市面上的其他芯片性能好很多。此外,征程6P实现了CPU、BPU、GPU和MCU四芯合一,进一步降低了系统部署成本。

另外就是我们的工程能力,在过去的几年里,地平线在体系化建设与研发质量管理方面投入了大量精力。地平线也是全球第一家拿到道路车辆安全和人工智能证书 ISO 8800 证书的企业,不仅如此,我们在功能安全、预期功能安全、网络安全等多方面都取得了显著进展和落地成果。同时,我们 ASPICE 方面也获得了Level 2认证,得到了多家国际顶级企业和国内顶级企业的认证。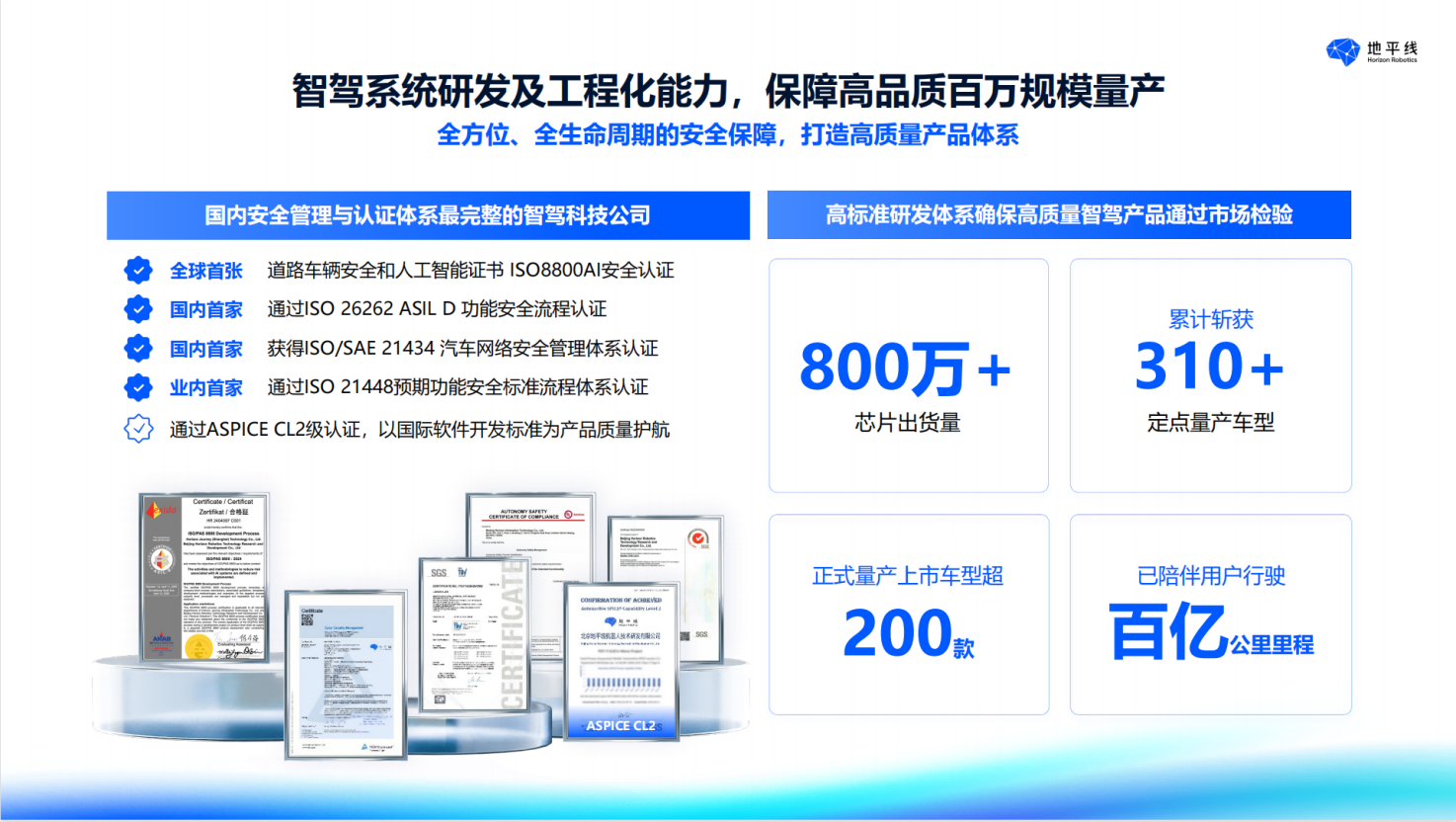
接下来再介绍一下,地平线在算法领域和芯片研究的集大成者——地平线城区辅助驾驶Horizon SuperDrive(简称HSD),它采用了一段式端到端模型,能够从容应对市区复杂场景。该模型在端到端架构基础上,增设“安全护栏”机制,既能提升性能底线,又突破性能上限。在传感器配置方面,HSD主要依赖11个摄像头与1个毫米波雷达,激光雷达为选装配置,此外还配备12个超声波雷达。我们的方案采用导航地图搭配特定特征信息,无需依赖高精地图,就能实现城区智能驾驶,系统的表现非常拟人,这是我们目前重点研发的产品。下面给大家看个视频。
接下来讲一下地平线“在中国为中国,在中国为全球”的服务理念。目前地平线除了支持国内主机厂的智能驾驶系统的生产和量产之外,同时也支持国内自主品牌出海的业务。除此之外,我们也在跟一些国际头部企业进行合作。我们跟大众成立了合资企业酷睿程,另外还跟大陆集团成立了合资企业HCT。在这两家合资企业中,我们均投入了技术与知识产权,携手共同提升产品的性能,为国际客户提供服务。
在今年上海车展上,我们宣布了两项重磅国际战略合作。一个是跟国际Tier-1巨头博世进行战略合作,博世将在其下一代一体机 MPC 4 全球平台上采用我们的征程 6B计算方案,未来会面向全球客户提供产品与服务。另外我们跟电装也有一个战略合作,未来将携手一起为电装的客户提供服务。
展望一下,对于整个智能驾驶产业未来的发展趋势,虽然硬件、软件都在不断发展,但最后都会进一步集成。硬件层面,会从目前的分布式架构集成至中央计算平台。软件层面同样会实现集成,最终形成统一的 AI Agent。最终所有的控制功能将在此基础上进行分布式控制。以后可以想象在不远的将来,当你想回家给老婆买束花,只需要一个指令就可以让整个系统帮你实现。
我们希望能够跟产业链上下游的合作伙伴共同打造人人爱用的智能驾驶产品,来兑现智能驾驶的用户价值。
我的分享就这么多,谢谢大家。